Nowoczesne roboty koszące są w stanie omijać przeszkody różnej wielkości i rodzaju, co czyni je niezastąpionymi pomocnikami w utrzymaniu idealnego trawnika. Każdy robot koszący omija przeszkody, jednak nie każdy robi to równie sprawnie i bezbłędnie. Kosiarki automatyczne, w zależności od producenta i modelu, są wyposażone w różnego rodzaju czujniki, systemy nawigacji i mapowania. To dzięki nim potrafią rozpoznawać i skutecznie unikać obiektów znajdujących się na trawniku, a także pokonywać drogi czy chodniki dzielące działkę.

Podstawowe systemy omijania przeszkód i nawigacji
Tradycyjne przewody ograniczające
Najprostszym i podstawowym systemem omijania przeszkód, stosowanym w wielu robotach koszących, jest otoczenie wszelkich obiektów na obszarze koszenia przewodem ograniczającym. System ten działa niezawodnie w przypadku stałych przeszkód, takich jak drzewa lub wyspowe rabaty. Każdy nowy obiekt stały należy zaznaczyć kablem, inaczej kosiarka autonomiczna w niego wjedzie. Problem stanowią jednak przeszkody ruchome.
Kiedy zastanawiamy się nad zakupem robota koszącego, jednym z najczęściej zadawanych pytań jest: „Czy robot koszący przejedzie przez chodnik?”. Odpowiedź brzmi: tak, ale z pewnymi zastrzeżeniami. Roboty koszące są zaprojektowane tak, aby radzić sobie z różnymi przeszkodami w ogrodzie, w tym z chodnikami. Aby zapewnić prawidłowe działanie robota, konieczne jest wyznaczenie dla niego trasy za pomocą przewodu ograniczającego. Jeśli chcesz, aby robot koszący przejechał przez chodnik, musisz odpowiednio poprowadzić ten przewód.
Najlepszym sposobem na ukrycie przewodu ograniczającego jest wpuszczenie go w fugę łączącą płyty chodnikowe. Dzięki temu przewód stanie się niewidoczny gołym okiem i będzie mniej narażony na uszkodzenia. Jest to rozwiązanie zarówno estetyczne, jak i praktyczne. Istnieje również bezpieczniejszy sposób rozprowadzania przewodu ograniczającego, częściej stosowany przez instalatorów, polegający na położeniu go pod powierzchnią trawnika za pomocą specjalnej maszyny. Sposób ten zabezpiecza przewód przed uszkodzeniami.
Przewody doprowadzające (prowadzące)
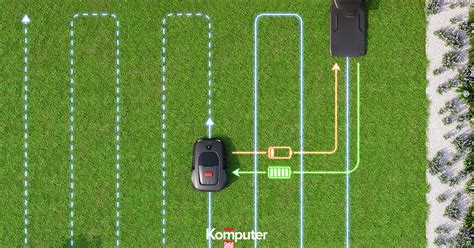
W instalacjach robotów koszących, np. Automower®, zadaniem opatentowanego przewodu doprowadzającego jest odprowadzenie robota z powrotem do stacji ładującej, skracając czas szukania, zwłaszcza w przypadku skomplikowanych ogrodów. Przewody doprowadzające są również używane do prowadzenia robota koszącego do odległych obszarów pracy i przejazdu przez wąskie przejścia o szerokości zaledwie 60 cm. W przypadku przejść węższych niż 2 m, zaleca się użycie przewodu doprowadzającego, który poprowadzi przez nie robota koszącego. Robot koszący wybiera różne trasy w drodze do i ze stacji ładującej, aby zapobiec pozostawianiu śladów na trawniku.
W zależności od modelu może być wymagane użycie przewodu doprowadzającego. W przypadku innych modeli jest to opcja, ale zawsze zaleca się zainstalowanie jednego lub kilku przewodów doprowadzających. Liczba przewodów doprowadzających, które robot koszący może obsługiwać, zależy od modelu.
Jak ułożyć przewód doprowadzający: instrukcje krok po kroku
- Rozpoczęcie od stacji ładującej: Przewód doprowadzający powinien mieć swój początek z tyłu stacji ładującej i być ułożony centralnie pod płytą podstawy. Jeden koniec przewodu doprowadzającego należy podłączyć do stacji ładującej, a drugi do przewodu ograniczającego.
- Wybór odpowiedniego przewodu: W całej instalacji należy użyć tego samego typu przewodu. Przewód doprowadzający i przewód ograniczający powinny być tego samego typu.
- Użycie akcesoriów: Do podłączania przewodu doprowadzającego do stacji ładującej i przewodu ograniczającego należy użyć specjalnych złączy i łączników.
- Podłączenie przewodu doprowadzającego: Umieścić złącze na końcu przewodu i podłączyć je do odpowiedniego styku stacji ładującej (np. G1, G2 lub G3). Zaleca się oznaczenie przewodów etykietami. Za pomocą szpilek przymocować przewód do podłoża aż do zaplanowanego miejsca połączenia z przewodem ograniczającym.
- Podłączenie przewodu ograniczającego: W punkcie połączenia z przewodem ograniczającym przeciąć przewód ograniczający i podłączyć koniec przewodu doprowadzającego do przewodu ograniczającego za pomocą łącznika.
- Skalibrowanie i sprawdzenie: Zaleca się skalibrowanie przewodu doprowadzającego i sprawdzenie, czy robot koszący może podążać za przewodem doprowadzającym do stacji ładującej i bez problemu się zadokować.
Warto wiedzieć:
- Jeśli trawnik jest otwarty, poprowadź przewód doprowadzający ze stacji ładującej do środkowego punktu po przeciwnej stronie trawnika.
- Należy unikać układania przewodu pod ostrym kątem (powyżej 45°), ponieważ może to utrudnić robotowi koszącemu podążanie za przewodem doprowadzającym.
- Robot koszący zawsze porusza się po lewej stronie przewodu doprowadzającego, patrząc w stronę stacji ładującej, dlatego należy zapewnić jak najwięcej miejsca po lewej stronie przewodu.
- W przypadku układania przewodu doprowadzającego na pochyłości należy umieścić go po przekątnej, aby zapewnić optymalną przyczepność robota koszącego.
- Przewód doprowadzający nie może krzyżować się z przewodem ograniczającym, np. biegnącym do wyspy.
- Należy zachować minimalną odległość 30 cm między przewodem ograniczającym a przewodem doprowadzającym.
Zaawansowane systemy nawigacji i unikania przeszkód bezprzewodowo
Kosiarki automatyczne bez kabli
Nowoczesne roboty koszące bez kabla nie wymagają instalacji przewodu ograniczającego. Obszar koszenia wyznacza się za pomocą specjalnej aplikacji mobilnej, w oparciu o sygnał GPS. Roboty koszące Mammotion poruszają się po trawniku według zaprogramowanych tras, nie w sposób losowy. Za pomocą aplikacji mobilnej można wyznaczyć plan koszenia uwzględniający wszelkie przeszkody. Jeśli na trawniku pojawi się nowa przeszkoda, wystarczy przeprogramować trasę kosiarki korzystając z aplikacji w telefonie. W ten sposób możesz w każdej chwili i z dowolnego miejsca wyłączyć z obszaru koszenia potencjalne przeszkody usytuowane na trawniku. Aplikacja Mammotion pozwala wyznaczyć „strefy zakazane”, do których robot koszący nie będzie wjeżdżał.
Systemy oparte na GPS i RTK
Robot koszący z GPS to urządzenie autonomiczne, które samodzielnie kosi trawnik na podstawie zmapowanego terenu, bez potrzeby ręcznego sterowania przez właściciela. Wykorzystuje nawigację satelitarną do precyzyjnego mapowania terenu i planowania optymalnej trasy koszenia, w odróżnieniu od zwykłych robotów, które poruszają się losowo. Modele wyposażone w GPS zmniejszają czas pracy, minimalizują straty energii i zapewniają równomiernie skoszony trawnik, nawet na działkach o złożonym kształcie.
System GPS w robocie koszącym zbiera sygnały z satelit Globalnego Systemu Pozycjonowania (GNSS) i oblicza dokładne współrzędne urządzenia w czasie rzeczywistym. Najnowocześniejsze modele robotów używają technologii RTK (Real-Time Kinematic), która zwiększa dokładność z około 5 metrów do zaledwie 2-3 centymetrów. RTK wymaga dodatkowej stacji bazowej lub dostępu do korekcji satelitarnych przesyłanych przez sieć, co pozwala na pracę z niezwykłą precyzją. Robot koszący z GPS opiera się na co najmniej 4-8 satelitach jednocześnie, aby obliczyć swoją pozycję - im więcej dostępnych satelit, tym bardziej niezawodna nawigacja satelitarna.
Dokładność GPS i przeszkody: Zasięg i jakość sygnału GPS zależy od otwartości terenu - robot koszący z GPS pracuje najlepiej na otwartych działkach, gdzie widoczność nieba wynosi co najmniej 60-70%. Przeszkody naturalne, takie jak korony drzew, mogą osłabić sygnał satelitarny nawet o 30-40%, co czasami powoduje krótkotrwałe utraty sygnału i przerwanie mapowania terenu. Bliskość zabudowań, murów betonowych lub metalowych płotów również zakłóca sygnał, szczególnie gdy robot pracuje w cieniu domu lub w wąskiej alejce pomiędzy budynkami. Praktyczne rozwiązania obejmują: przesunięcie stacji dokowania na bardziej otwarte miejsce, ograniczenie pracy robota do południa i popołudnia (gdy satelity znajdują się wyżej na niebie), lub zastosowanie RTK z siecią korekcji satelitarnych, która znacznie zmniejsza wrażliwość na zakłócenia.
Topografia gruntu: Robot koszący z GPS na pochyłościach pracuje w ograniczonym zakresie - maksymalne pochylenie terenu wynosi zazwyczaj 20-30 stopni, w zależności od modelu producenta. Na terenach silnie pochyłych (powyżej 35-40 stopni) ryzyko przewrócenia się robota jest wysokie, a mapowanie terenu może być niedokładne. Topografia gruntu wpływa również na pobór energii - koszenie pod górę zużywa dwa razy więcej baterii niż na płaskim terenie. Producenci zawsze podają maksymalne pochylenia w specyfikacji technicznej - przed zakupem warto sprawdzić, czy robot jest przeznaczony dla terenu wokół domu.
Stacje dokowania i ścieżki logiczne: Stacja dokowania stanowi bazę dla robota koszącego z GPS - to tutaj robot ładuje baterie, czyszczą się kontakty i pobiera aktualizacje programu. Robot planuje trasę koszenia na podstawie mapy terenu i algorytmu optymalizacji, który minimalizuje czas przejazdu i zużycie energii, wybierając przejazd równoległymi pasami zamiast chaotycznego poruszania się. Ścieżki logiczne powstają poprzez analizę kształtu działki - dla prostokątnych działek robot kosi liniami od góry do dołu, natomiast dla działek o nieregularnym kształcie aplikacja dzieli teren na strefy i przydziela każdej z nich optymalną trasę.
Geofencing: Geofencing to system wirtualnych granic, który zabezpiecza robota koszącego z GPS poprzez śledzenie GPS i alarm kradzieży. Właściciel definiuje w aplikacji strefę bezpieczeństwa wokół domu lub działki - jeśli robot opuści tę strefę, właściciel otrzyma natychmiast powiadomienie push na telefon. GPS zamontowany w robocie wysyła sygnał lokalizacyjny co kilka minut, co pozwala na namierzenie urządzenia w przypadku kradzieży.
Czujniki zderzeniowe
Czujniki zderzeniowe, stosowane m.in. w kosiarkach samojezdnych Ambrogio, umożliwiają wykrywanie i omijanie większych obiektów. Zasada ich działania jest prosta: gdy robot koszący uderzy w masywny obiekt o wysokości ponad 10 cm, czujnik uderzenia blokuje ruch robota w kierunku przeszkody. W efekcie kosiarka automatyczna zmienia trasę i wznawia koszenie w inną stronę. W kosiarkach automatycznych CEDRUS C-MOW z serii M, przeznaczonych do mniejszych ogrodów, urządzenia wyposażono w czujniki zderzenia, które wykrywają moment dotknięcia przeszkody, a następnie zmieniają kierunek pracy.
Czujniki wizyjne (kamery i sztuczna inteligencja)
Roboty koszące wyposażone w czujniki wizualne dosłownie „widzą” otoczenie za pomocą kamer. Na tej zasadzie działa czujnik VisionFence obecny w kosiarkach samojezdnych Segway Navimow. To innowacyjne urządzenie „widzi” wszystko w zasięgu do 5 metrów i w zakresie 140°.
Innym przykładem są kosiarki autonomiczne Mammotion z zaawansowanym systemem pozycjonowania 3D Vision + RTK Fusion. Dzięki połączeniu czujników wizualnych z technologią RTK precyzyjnie omijają przeszkody z dokładnością na poziomie 1-2 cm. Samoczyszcząca kamera wizyjna 3D samodzielnie wykrywa zanieczyszczenia na obiektywie i na bieżąco je usuwa, więc nic nie zakłóca widoku. Nawigacja RTK umożliwia pozycjonowanie z dokładnością co do centymetra nawet na dużych powierzchniach. Korzystając z połączenia VLAM i Vision AI robot za pomocą kamery 3D skanuje otoczenie, tworząc trójwymiarową mapę w czasie rzeczywistym. Na bieżąco identyfikuje i omija przeszkody, takie jak drzewa czy meble ogrodowe. Po ich wykryciu aktualizuje mapę i dostosowuje trasę koszenia.
Najnowszym osiągnięciem w dziedzinie wizyjnej nawigacji i detekcji przeszkód są roboty koszące TerraMow. Wykorzystują innowacyjną technologię TerraVision, system nawigacji wizyjnej 3D opartej na sztucznej inteligencji. Łączy trzy wysokowydajne kamery samochodowe i najnowocześniejszy system wizyjny wykorzystujący sztuczną inteligencję. Urządzenie na podstawie stereowizji i segmentacji obrazu automatycznie mapuje trawnik, wyznacza granice i omija przeszkody z dokładnością co do centymetra. Robot koszący TerraMow wykrywa nawet małe przedmioty, bezbłędnie je rozpoznaje i omija w czasie rzeczywistym. System potrafi wykrywać obiekty już od około 10×10×5 cm z dokładnością do około 1 cm, co zwiększa bezpieczeństwo i precyzję koszenia. Podczas pierwszego przejazdu robot skanuje trawnik i buduje jego trójwymiarowy model, który następnie wykorzystuje do planowania tras koszenia. Co ważne, mapa nie jest stała - robot stale ją aktualizuje, jeśli w ogrodzie pojawią się nowe elementy, takie jak meble ogrodowe, donice czy świeże nasadzenia. System kamer umożliwia omijanie przeszkód, a sztuczna inteligencja pozwala robotowi stale uczyć się układu ogrodu. Kamery o rozdzielczości HD 1920×1280 umożliwiają wykrywanie bardzo małych obiektów, takich jak zabawki, gałęzie czy drobne elementy ogrodowe. Robot TerraMow szybko wykrywa i omija przeszkody pojawiające się na trawniku - od zabawek po gałęzie czy zwierzęta. Dzięki systemowi percepcji 3D analizuje otoczenie w czasie rzeczywistym i natychmiast reaguje na zmiany w ogrodzie.

W robotach koszących CEDRUS wszystkie roboty koszące posiadają specjalne czujniki służące do wykrywania przeszkód. Flagowy model C-MOW z serii L wyposażony jest w specjalny sensor, który umożliwia wykrywanie przeszkód już z pewnej odległości.
Czujniki ultradźwiękowe (radary ultrasoniczne)
Czujniki ultradźwiękowe, inaczej radary ultrasoniczne, zastosowano m.in. w robotach koszących Mammotion LUBA oraz Segway Navimow H3000E. Czujnik Ultrasonic można również dokupić osobno i wyposażyć w niego dowolny model Segway z linii H. Czujnik montowany na zewnątrz obudowy robota koszącego emituje krótkie, regularne impulsy dźwiękowe o wysokiej częstotliwości. Fale dźwiękowe, które natrafią na jakiś obiekt, są odbijane z powrotem do odbiornika. W ten sposób robot koszący „słyszy” przeszkody, więc z wyprzedzeniem zmienia kierunek jazdy, aby je na czas ominąć.
LiDAR (laserowa nawigacja)
LiDAR (ang. Light Detection and Ranging) to innowacyjny system laserowej nawigacji, stosowany w robotach koszących z funkcją mapowania w 3D, np. kosiarkach autonomicznych Dreame oraz Mova. Innowacyjne urządzenie skanuje otoczenie za pomocą wiązki laserowej, następnie zbiera dane o jej powrocie za pomocą czujników teleskopowych. W ten sposób robot koszący laserowy wykrywa obiekty we wszystkich kierunkach (360° x 59°), w zasięgu do 70 m.

Ogólne zasady działania robotów koszących i ich autonomia
Roboty koszące to inteligentne maszyny, które wykonują dokładnie takie polecenia, jakie zostały zaprogramowane przez człowieka. Są spełnieniem przepowiedni futurystów, którzy przed laty snuli wizje świata, w którym roboty zastępują ludzi w wykonywaniu prac ciężkich i żmudnych, do których z pewnością należy koszenie trawy. Branża ogrodnicza rozwija się bardzo szybko pod względem nowoczesnych rozwiązań technologicznych, oferując coraz więcej narzędzi, które wspierają właścicieli ogrodów poprzez całkowitą automatyzację pracy.
Sposób działania robotów koszących przypomina pracę kosiarek elektrycznych, ale bez kabla i bez obsługi człowieka. Kosiarki automatyczne są w 100% zautomatyzowane i wyposażone w system czujników, które pozwalają omijać przeszkody i kosić dokładnie wyłącznie ten teren, który został zdefiniowany i wytyczony przez użytkownika. Bezpieczne są więc cenne okazy roślin, które rosną na skraju trawnika lub na rabatach wytyczonych w jego obszarze. Roboty koszące najnowszej generacji potrafią rozpoznawać także żywe przeszkody, które nagle stają na ich drodze - ptaki, wiewiórki, psy czy koty nie zostaną stratowane, a ominięte. Jeśli jednak zwierzęta pojawią się na trasie przejazdu, dzięki czujnikom wykrywającym istoty żywe, kosiarka zatrzymuje się, następnie omija przeszkodę i powraca na wytyczony szlak. Ominięte miejsce skosi przy kolejnym przejeździe.
Dzięki pojemnym akumulatorom roboty koszące mają czas pracy wynoszący od jednej do kilku godzin na jednym ładowaniu. Mogą pracować całą dobę. Kolejność zdarzeń jest następująca: ładowanie akumulatora w stacji dokującej, koszenie, zjazd do stacji ładującej, powrót do ostatniego miejsca, dalsze koszenie trawników. Ten ciąg sekwencji kosiarka może powtarzać w trybie nieprzerwanym. Najczęściej użytkownicy programują roboty koszące na wybrane dni tygodnia i określone godziny, np. podczas nieobecności domowników. Roboty koszące CEDRUS C-MOW można połączyć z aplikacją mobilną „Robotic-Mower Connect”, która służy do zdalnej obsługi urządzenia. Za jej pomocą możliwe jest własnoręczne ustawienie harmonogramu koszenia trawnika. Można też samemu, poza standardowymi godzinami koszenia, uruchomić kosiarkę, zatrzymać ją, odesłać do stacji ładującej bądź wydać polecenie koszenia jedynie po krawędziach wyznaczonych przez przewód ograniczający.
Właściciel programuje roboty koszące, ustalając czas pracy oraz wysokość cięcia trawników. Koszenie odbywa się przy pomocy noży. Robot do koszenia trawy może mieć jeden stały nóż lub zestaw kilku, kilkunastu lub kilkudziesięciu ostrzy umieszczonych na obracającej się tarczy. Takie ostrza są cienkie i ostre niczym żyletki. Dla bezpieczeństwa podczas konserwacji czy przenoszenia robot koszący chowa tarczę z nożami automatycznie. Roboty koszące nie mają kosza czy pojemnika na ściętą trawę. Są wyposażone w system ściółkowania (mulczowania) trawy, co w praktyce oznacza bardzo dokładne rozdrobnienie ściętych ździebeł i rozsypanie ich na powierzchni trawnika. Mulczowanie jest bardzo przydatne w walce z mchem.
Nowoczesne roboty koszące bez problemu pracują w słońcu i w deszczu, a system alarmów chroni urządzenie przed podniesieniem go przez osobę nieupoważnioną. Kosiarki automatyczne są także odporne na wahania temperatur, przystosowane do pracy w temperaturze do 45 stopni Celsjusza. Roboty koszące CEDRUS C-MOW wyposażone są w czujniki deszczu. W momencie, kiedy taki detektor zostanie zalany wodą (lub spadnie na niego co najmniej jedna kropla), kosiarka automatyczna wróci do stacji ładującej i będzie czekać do wyschnięcia czujnika. Po tym, jeśli w harmonogramie ustawione jest na ten czas koszenie, urządzenie wraca do pracy.
Wyzwania i rozwiązania w nawigacji
Mimo zaawansowanej technologii, roboty koszące mogą napotkać pewne wyzwania:
- Utrudnienia w pracach pielęgnacyjnych: Źle zamontowany kabel ograniczający może utrudniać prace pielęgnacyjne, głównie wertykulację. Położony na powierzchni należy przekładać, co nie jest wygodne. Zakopany zbyt płytko kabel może ulec uszkodzeniu.
- Ryzyko uszkodzenia przedmiotów: Inteligentne kosiarki omijają przeszkody, ale nie wszystkie. Ubranie, które zsunie się z leżaka lub spadnie z suszarki, zabawki dziecięce, klamerki do bielizny, gazety narażone są na zniszczenie.
- Blokowanie robota: Przy wilgotnej trawie zdarza się, że kosiarka zboczy z wytyczonej trasy i „chwyci” kołami miękkie piaszczyste podłoże pobocza trawnika, korę lub ziemię ze ścieżki.
- Niedokładne koszenie: Roboty koszące niekiedy pozostawiają „niedoróbki” polegające na nierównym przycięciu trawy lub ominięciu fragmentu trawnika. Niedogodnością dla użytkownika są też pasy nieskoszonej trawy na obrzeżach, przy budynkach, elementach architektury ogrodowej. Można wyeliminować konieczność dodatkowego podkaszania, projektując trawnik pod pracę robota.
- Uszkodzenie trawnika w miejscach podjazdów: Tam, gdzie robot koszący pracuje na stromych podjazdach, na przykład łączących dwa poziomy trawnika, może dojść do uszkodzenia murawy. Czasem koła nie radzą sobie ze stromizną, ślizgają się i buksują. Podobnie dzieje się, gdy kosiarka schodzi w dół trawersując - zmieniając kierunek też pozostawia wyraźne ślady, a nawet uszkodzenia na podjeździe. Głębokie ślady roboty koszące pozostawiają również na obrzeżach.