Silnik krokowy to rodzaj silnika elektrycznego, który charakteryzuje się specyficznym sposobem działania - jego wirnik obraca się w precyzyjnie określonych, małych "krokach". W przeciwieństwie do tradycyjnych silników, które zapewniają ciągły ruch obrotowy, silnik krokowy wykonuje ruch o ściśle zdefiniowany kąt w odpowiedzi na impulsy sterujące. Umożliwia to bardzo dokładne kontrolowanie jego położenia.
Można to porównać do działania zegara, gdzie każdy impuls odpowiada ruchowi wskazówki o konkretny kąt, w odróżnieniu od swobodnie toczącego się koła roweru. Dzięki tej cechie silniki krokowe są szeroko stosowane w dziedzinach wymagających precyzyjnego pozycjonowania, takich jak automatyka, robotyka, druk 3D, maszyny CNC, a także w motoryzacji.
Jak działa silnik krokowy?
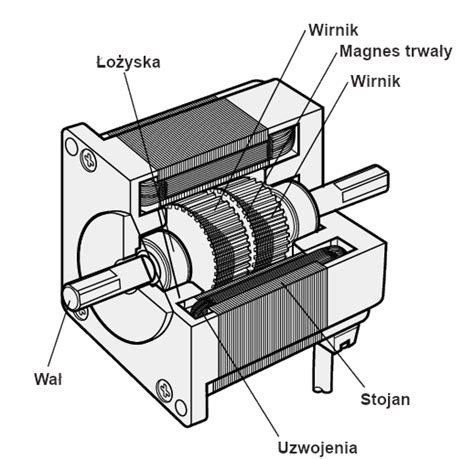
Podstawą działania silnika krokowego są zjawiska elektromagnetyczne. Konstrukcja silnika obejmuje wirnik (część ruchoma) oraz stojan (część nieruchoma) wyposażony w zestaw cewek. Przepływ prądu przez cewki generuje pola magnetyczne, które oddziałują z magnesami na wirniku, przyciągając je lub odpychając. Każdy impuls elektryczny powoduje obrót wirnika o ściśle określony kąt, zwany krokiem.
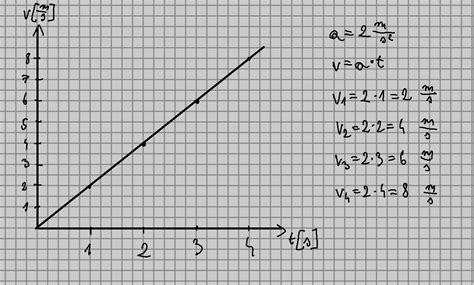
Przykładowo, silnik krokowy z kątem kroku 1,8° wykonuje pełny obrót wału po 200 krokach (360° / 1,8° = 200). Prędkość obrotowa silnika jest proporcjonalna do częstotliwości impulsów sterujących.
Rodzaje silników krokowych i ich budowa
Silniki krokowe można klasyfikować na podstawie ich budowy i sposobu zasilania. Najczęściej spotykane typy to:
- Silniki PM (Permanent Magnet): wykorzystują magnesy trwałe na wirniku.
- Silniki VR (Variable Reluctance): opierają się na zmiennej reluktancji (opory magnetycznej) między wirnikiem a stojanem.
- Silniki HB (Hybrid): stanowią połączenie cech silników PM i VR, łącząc zalety obu rozwiązań, takie jak wysoki moment obrotowy i dobra kultura pracy. Są to obecnie najczęściej stosowane silniki krokowe.
Pod względem liczby faz i wyprowadzeń, silniki krokowe mogą mieć:
- 4 wyprowadzenia: klasyczny silnik dwufazowy.
- 6 wyprowadzeń: z uzwojeniami posiadającymi środkowe odczepy.
- 8 wyprowadzeń: z uzwojeniami podzielonymi na pół, co umożliwia różne konfiguracje połączeń (szeregowe dla niższych prędkości, równoległe dla wyższych prędkości przy większym prądzie).
Większość silników krokowych posiada 200 kroków na obrót (kąt kroku 1,8°). Dostępne są również wersje o 400 krokach na obrót (kąt kroku 0,9°).

Zaawansowane warianty silników krokowych
W celu zwiększenia precyzji, momentu obrotowego lub funkcjonalności, stosuje się różne modyfikacje silników krokowych:
- Mikrokroki (Microstepping): technika sterowania polegająca na podziale podstawowego kroku silnika na jeszcze mniejsze jednostki. Pozwala to na uzyskanie bardzo płynnego ruchu i precyzyjnej regulacji położenia, co jest kluczowe w aplikacjach wymagających najwyższej dokładności.
- Silnik krokowy z przekładnią: dodatkowa przekładnia zwiększa moment obrotowy kosztem prędkości obrotowej. Jest to rozwiązanie idealne dla aplikacji wymagających dużej siły, np. w urządzeniach transportowych czy automatyce przemysłowej.
- Silnik krokowy z enkoderem (układ zamkniętej pętli - close loop): wyposażony w enkoder (optyczny, magnetyczny lub rezolwerowy), który monitoruje pozycję wału i pozwala na korektę ewentualnych błędów. Dzięki temu system sterowania wykrywa i koryguje zgubione kroki, zbliżając działanie silnika do serwonapędu.
- Silnik krokowy ze sterownikiem: posiada zintegrowany sterownik ułatwiający obsługę i precyzyjną kontrolę prędkości oraz pozycji. Sterownik generuje odpowiednią sekwencję impulsów dla cewek silnika.
Kluczowe cechy i zalety silników krokowych
Silniki krokowe oferują szereg istotnych zalet, które czynią je popularnym wyborem w wielu zastosowaniach:
- Precyzyjne pozycjonowanie: Możliwość dokładnego określenia pozycji wału bez konieczności stosowania zewnętrznych czujników położenia (w układach otwartej pętli).
- Wysoki moment trzymający: Zdolność do utrzymania zadanej pozycji nawet pod obciążeniem, gdy silnik jest zasilany, ale nieruchomy.
- Płynność ruchu: Szczególnie przy zastosowaniu mikrokroków, ruch silnika jest bardzo płynny, co eliminuje gwałtowne szarpnięcia.
- Odporność na przeciążenia: Silniki są w stanie utrzymać pozycję przy napotkaniu niewielkich przeszkód.
- Energooszczędność: Pobierają prąd głównie wtedy, gdy są w ruchu lub utrzymują pozycję.
- Prosta konstrukcja i sterowanie: Brak szczotek (w większości typów) przekłada się na długą żywotność i mniejsze zużycie. Sterowanie jest relatywnie proste, szczególnie przy integracji z mikrokontrolerami.
- Możliwość integracji: Doskonale współpracują z nowoczesnymi systemami automatyki, sterowaniem mobilnym, czujnikami ruchu czy systemami rozpoznawania.
Jak działają silniki krokowe - Silnik elektryczny
Ograniczenia silników krokowych
Pomimo licznych zalet, silniki krokowe posiadają również pewne wady:
- Spadek momentu obrotowego wraz ze wzrostem prędkości: Jest to największe ograniczenie, gdzie moment na wale silnika maleje wraz ze wzrostem prędkości obrotowej.
- Możliwość gubienia kroków: Gdy moment oporowy w układzie mechanicznym przekroczy moment wytwarzany przez silnik, może dojść do utraty synchronizacji i niedokładnego pozycjonowania. Aby temu zapobiec, należy dobierać silnik z odpowiednim zapasem mocy i stosować odpowiednie rampy przyspieszenia/hamowania.
- Rezonanse mechaniczne: Przy pewnych prędkościach pracy silnik może wpadać w rezonans, co objawia się nierównomierną pracą i spadkiem momentu.
- Niższa sprawność energetyczna: W porównaniu do innych typów silników elektrycznych, sprawność energetyczna silników krokowych może być niższa.
- Wymagane sterowniki: Do efektywnej pracy niezbędne są specjalistyczne sterowniki.
Typowe zastosowania silników krokowych
Wszechstronność i precyzja silników krokowych sprawiają, że znajdują one zastosowanie w wielu dziedzinach:
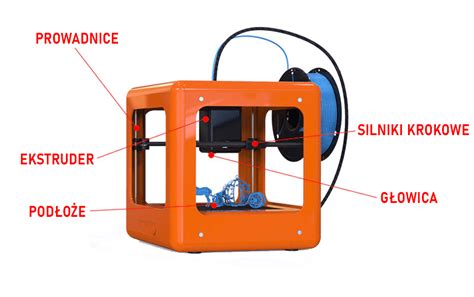
- Drukarki 3D: Odpowiedzialne za precyzyjne pozycjonowanie głowicy drukującej i podawanie materiału.
- Maszyny CNC: Sterowanie ruchem osi roboczych (frezarki, wypalarki, plotery) zapewniające wysoką dokładność obróbki.
- Robotyka: Wykorzystywane w ramionach robotów, manipulatorach i systemach chwytaków.
- Automatyka przemysłowa: W różnego rodzaju urządzeniach transportowych, mechanizmach regulacyjnych i systemach pozycjonujących.
- Urządzenia pomiarowe: Tam, gdzie wymagana jest dokładna kontrola położenia.
- Motoryzacja: Regulacja obrotów biegu jałowego, sterowanie przepustnicą, pozycjonowanie elementów.
- Urządzenia optyczne i medyczne: Precyzyjne sterowanie ostrością w obiektywach, pompy infuzyjne, urządzenia do dializy.
- Projekty DIY i prototypowanie: Łatwość integracji z platformami takimi jak Arduino i Raspberry Pi sprawia, że są popularnym wyborem dla hobbystów.
Rodzaje sterowań silnika krokowego
Istnieją trzy podstawowe metody sterowania silnikami krokowymi:
- Sterowanie pełnokrokowe (Full Step): Dwie fazy pracują jednocześnie, co zapewnia ruch o ustalonym kącie.
- Sterowanie półkrokowe (Half Step): Fazy są zasilane naprzemiennie (jedna, potem dwie), co podwaja rozdzielczość kroku i redukuje drgania.
- Sterowanie mikrokrokowe (Microstepping): Podział pojedynczego kroku na wiele mniejszych jednostek poprzez płynną zmianę proporcji napięć zasilających cewki. Zapewnia najwyższą płynność i precyzję ruchu.
Nowoczesne sterowniki umożliwiają realizację tych trybów sterowania, a także bardziej zaawansowane techniki, jak mikrokroki, które znacząco poprawiają płynność i dokładność pozycjonowania.
Parametry silnika krokowego
Przy wyborze silnika krokowego należy zwrócić uwagę na następujące parametry:
- Napięcie znamionowe uzwojeń
- Nominalne natężenie prądu
- Rezystancja uzwojenia
- Moment bezwładności rotora
- Moment trzymający (Holding Torque): Maksymalna siła utrzymująca silnik w danej pozycji przy zasilaniu.
- Charakterystyka momentu silnika w funkcji prędkości (Moment-Speed Curve)
- Maksymalna prędkość pracy (bez obciążenia)
- Prędkość start-stopowa
- Wymiary (np. standardy NEMA: NEMA 08, NEMA 11, NEMA 14, NEMA 17, NEMA 23, NEMA 34)
- Masa
Ważnym aspektem jest również moment trzymający, który określa maksymalną siłę, jaką silnik może wygenerować w spoczynku. Wraz ze wzrostem prędkości obrotowej, moment trzymający silnika krokowego maleje.
Podsumowanie
Silnik krokowy jest kluczowym elementem w wielu nowoczesnych technologiach, gdzie wymagana jest precyzyjna kontrola ruchu i pozycjonowania. Jego zasada działania oparta na dyskretnych krokach, w połączeniu z zaawansowanymi metodami sterowania, umożliwia osiągnięcie wysokiej dokładności przy zachowaniu prostoty konstrukcji i integracji. Dzięki ciągłemu rozwojowi technologicznemu, silniki krokowe stają się coraz bardziej wydajne, niezawodne i dostępne, co potwierdza ich niezastąpioną rolę w automatyce i robotyce.