W dzisiejszych sektorach produkcji i wytwarzania roboty przemysłowe stały się niezbędne, oferując niezrównaną wydajność, precyzję i niezawodność. Zasadniczo są to programowalne maszyny zdolne do autonomicznego wykonywania szeregu złożonych czynności. Wraz z szybkim postępem technologicznym roboty przemysłowe różnicują się i ewoluują, co czyni je jeszcze bardziej krytycznymi dla zrobotyzowanych systemów przemysłowych. W ostatnich latach szczególnie popularne stały się samojezdne wózki transportowe, a ich szybki rozwój doprowadził do powstania dwóch głównych typów: Automatycznych Pojazdów Sterowanych (AGV) oraz Autonomicznych Robotów Mobilnych (AMR).
AGV a AMR: kluczowe różnice
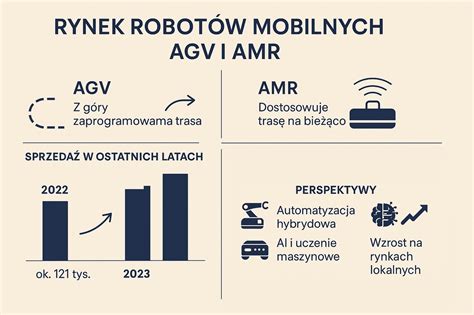
Na pierwszy rzut oka zautomatyzowane wózki transportowe (AGV) i stanowiące ich rozwinięcie pojazdy autonomiczne (AMR) niczym się nie różnią, a stawiane przed nimi zadania są również podobne. Podstawowa różnica między tymi pojazdami dotyczy sposobu sterowania nimi i nawigowania.
Automatyczne Pojazdy Sterowane (AGV)
Pojazdy AGV są zaprojektowane tak, aby podążać za oznaczonymi liniami lub przewodami na podłodze, lub wykorzystywać czujniki bądź kamery do podążania z góry określoną ścieżką. Są bardzo skuteczne w powtarzalnych zadaniach, gdzie środowisko pozostaje stałe. AGV są powszechnie wykorzystywane do zadań takich jak transport surowców na linie produkcyjne lub przenoszenie gotowych towarów do magazynów. Ich spójność i niezawodność sprawiają, że są cennym zasobem w ustrukturyzowanych środowiskach przemysłowych.
Metody nawigacji AGV
- Pętla indukcyjna: W podłodze hali wtapiany jest kabel, przez który płynie prąd elektryczny o określonej częstotliwości, wytwarzając pole magnetyczne wykrywane przez sensory na pojeździe. Modulacja pola magnetycznego pozwala przekazywać polecenia do sterownika AGV.
- Pętla magnetyczna: Naklejona na podłodze taśma magnetyczna (z materiału ferromagnetycznego) przekazuje sygnały do jednostki sterującej pojazdu poprzez czujniki magnetyczne. Metoda ta jest precyzyjna, pozwala na wykrywanie skrzyżowań i rozwijanie większych prędkości, jednak taśma wymaga okresowego odnawiania.
- Linia refleksyjna i optyczna: Na posadzce nakleja się taśmę lub maluje linię. Metoda refleksyjna wykorzystuje światło emitowane z pojazdu, którego odbicie pozwala wyznaczyć pozycję wózka. W metodzie optycznej kamera na pokładzie AGV monitoruje główną linię. Obie metody wymagają okresowego odnawiania linii.
- Znaczniki w określonych miejscach: System wizyjny lub skaner laserowy pojazdu AGV odnajduje punkty (znaczniki) umieszczone w hali, aby określić obecną pozycję wózka. Dokładność metody zależy od liczby i rozmieszczenia znaczników.
W przypadku AGV, które poruszają się po ustalonych trasach, zmiana trasy będzie albo niemożliwa, albo bardzo czasochłonna i kosztowna, wymagając modyfikacji w zewnętrznej infrastrukturze.
Autonomiczne Roboty Mobilne (AMR)
Roboty AMR, takie jak te od MiR (Mobile Industrial Robots), są wyposażone w zaawansowane czujniki i inteligencję pokładową, dzięki czemu mogą poruszać się po złożonych środowiskach bez wcześniej zdefiniowanych ścieżek. Roboty AMR mogą dynamicznie planować swoje trasy, rozpoznawać i omijać przeszkody oraz dostosowywać się do zmian w otoczeniu. Ten poziom autonomii sprawia, że są idealne do różnych zadań, w tym transportu materiałów, dostaw towarów do osób i skanowania zapasów.
Techniki nawigacji AMR
Pojazdy AMR wykorzystują do nawigowania albo wgraną wcześniej mapę danego obiektu, albo tzw. nawigację naturalną. W tym celu przeprowadzany jest najpierw przejazd testowy, w czasie którego wykonywane jest dokładne odwzorowanie terenu (tzw. mapowanie otoczenia). Do tego niezbędnym elementem wyposażenia AMR są czujniki, oprogramowanie przetwarzające pozyskane dane, a także system wizyjny, który mogą tworzyć kamery, lasery, kombinacja kamer i laserów lub technologia LiDAR.
Posiadając taką dokładną mapę obiektu, AMR może wytyczać za każdym razem inną, najbardziej optymalną trasę przejazdu. Za każdym razem AMR dokładnie skanuje otoczenie przed sobą i porównuje je w czasie rzeczywistym z wykonaną mapą, dzięki czemu jest w stanie wykryć przeszkodę i uniknąć kolizji. Jeśli droga będzie całkowicie zablokowana, pojazd zatrzyma się i ponownie ruszy zaraz po jej odblokowaniu.
System bezpieczeństwa robotów MiR
Roboty MiR posiadają dwa skanery laserowe z certyfikatem ISO 13849, spełniające normę bezpieczeństwa kategorii trzeciej, Performance Level d. Lasery umieszczone są na przednim i tylnym rogu robota, aby zapewnić 360-stopniowe pole widzenia. Dodatkową pomoc nawigacyjną zapewniają dwie kamery 3D zamontowane z przodu robota, które wykrywają przeszkody do 1950 mm przed pojazdem i od 50 do 1800 mm od podłogi.
Kompletny wieloczujnikowy system bezpieczeństwa, zintegrowany z robotami MiR, oferuje zauważalnie płynniejszą nawigację, pozwalając robotowi na szybsze i niezawodne wykonywanie zadań bez konieczności zatrzymywania się w przypadku przeszkód. Dodatkowe czujniki obejmują akcelerometr i żyroskop do wykrywania siły bezwładności, przyspieszenia i rotacji, oraz enkodery na każdym kole do pomiaru prędkości.
AMR wykorzystują algorytm Monte Carlo Localization (MCL), z wykorzystaniem danych skanera laserowego i odometrii poprzez filtr cząstek stałych, zaimplementowany w systemie operacyjnym ROS (Robot Operating System). Mapę można przygotować poprzez ręczny przejazd robotem lub konwersję rysunków CAD na plik graficzny.
Porównanie elastyczności i kosztów
Dzięki AMR otrzymujesz inteligentną nawigację, która nie wymaga dużych modyfikacji w fabryce. AMR oferują wysoką elastyczność i mogą wykonywać różne zadania w różnych lokalizacjach dzięki prostym dostosowaniom oprogramowania. Ich wdrożenie jest szybsze i tańsze, co skutkuje szybkim zwrotem z inwestycji (często poniżej sześciu miesięcy). W przeciwieństwie do AGV, AMR dostosowują się bez wysiłku do zmieniających się środowisk i wymagań produkcyjnych, co jest niezbędne w nowoczesnych, zwinnych przedsiębiorstwach.
Zmiana tras dla AGV wiąże się z dodatkowymi kosztami i zakłóceniami, ponieważ pojazdy te mają ograniczoną inteligencję pokładową i nie mogą omijać przeszkód - zatrzymują się, dopóki przeszkoda nie zostanie usunięta.
Zastosowania robotów mobilnych w przemyśle
Roboty przemysłowe nie są ograniczone do jednego sektora; ich wszechstronność sprawia, że są cennymi zasobami w wielu dziedzinach:
- Motoryzacja: Roboty wykonują spawanie, malowanie, montaż i kontrolę, znacznie zwiększając szybkość i jakość produkcji.
- Elektronika: Precyzja jest kluczowa, roboty są wykorzystywane do montażu drobnych komponentów, testowania i pakowania.
- Opieka zdrowotna: Roboty pomagają w operacjach chirurgicznych, obsługują delikatne materiały i wspierają potrzeby logistyczne.
- Szybkozbywalne dobra konsumpcyjne (FMCG): Od pakowania po paletyzację, roboty usprawniają linie produkcyjne, czyniąc je bardziej wydajnymi.
- Logistyka i 3PL: Roboty zwiększają wydajność operacji magazynowych, zarządzania zapasami i procesów realizacji zamówień.
Autonomiczne roboty mobilne - Magazyn Robotów 🏎
Wdrożenie robotów MiR w Schneider Electric Industries Bukowno
Firma Mobile Industrial Robots (MiR), będąca jednym z liderów na rynku autonomicznych robotów mobilnych (AMR), wdrożyła robota MiR500 w zakładzie Schneider Electric Industries w Bukownie. Zakład ten, o powierzchni 5300 m2, produkuje wyłączniki aparatury niskich napięć, rozłączniki oraz akcesoria. Autonomiczny robot transportuje między produkcją a magazynem wyroby o masie do 400 kg, co sprzyja optymalizacji logistyki wewnętrznej i obniżeniu kosztów produkcji.
Schneider Electric Industries Bukowno szacuje, że okres zwrotu z inwestycji w robota MiR500 będzie krótki. Wdrożenie pozwoliło zredukować koszty logistyki wewnętrznej oraz liczbę zużywanych palet, gdyż mobilny robot transportuje dwie warstwy produktów na jednej palecie, umożliwiając załadowanie więcej towaru na ciężarówkę.
MiR500 pracuje przez całą dobę, w systemie trójzmianowym. Wykonuje osiem typów pętli, po około 140 m każda, pokonując łącznie 5,5-6 km w ciągu jednej zmiany. Po otrzymaniu misji od magazyniera, robot pobiera pustą paletę z magazynu, jedzie z nią na linię produkcyjną, odstawia na stojak, a następnie zabiera paletę z gotowymi wyrobami i wraca z nią na magazyn. Moduł MiR Pallet Lift do podnoszenia, w który wyposażono robota MiR500, ułatwia dźwiganie palet ze stelaża MiR Pallet Rack. Czujniki I/O połączone z siecią Wi-Fi przekazują na bieżąco pozycję robota, co pozwala na ciągłe monitorowanie trasy transportowanych palet.

Bezpieczeństwo i elastyczność
Lasery 360° stopni śledzą bez przerwy otoczenie robota mobilnego, gwarantując bezpieczeństwo. W porównaniu z wykorzystywanym wcześniej wózkiem AGV typu „line follower”, który mógł przeoczyć obecność człowieka, robot MiR500 pracuje w bezpieczny sposób w dynamicznym środowisku - wykrywa ludzi oraz maszyny i zatrzymuje się lub omija przeszkody. Zapewnieniu bezpieczeństwa służy także sygnalizacja dźwiękowa i świetlna. Przed wjazdem do pomieszczeń, w których mogą znajdować się ludzie, MiR500 sygnalizuje dźwiękiem swoją obecność i odczekuje zaprogramowany czas.
Wdrożenie robota MiR500 zostało dobrze odebrane przez zespół inżynierów i magazynierów, którzy doceniają prostotę obsługi i przyjazny dla użytkownika interfejs webowy. Zwracają także uwagę na ilość miejsca, którą udało się odzyskać po usunięciu wózków wykorzystywanych przez AGV.
Integracja robotów mobilnych z systemami IT
Jednym z największych przełomów w zastosowaniu autonomicznych pojazdów w przemyśle jest możliwość dynamicznej komunikacji z otoczeniem. Roboty mobilne są coraz częściej integrowane z nadrzędnymi systemami zarządzania produkcją i logistyką, takimi jak MES (Manufacturing Execution System), WMS (Warehouse Management System) i ERP (Enterprise Resource Planning).
Komunikacja z maszynami i liniami produkcyjnymi
Nowoczesna maszyna pakująca może wysłać do AMR sygnał o zakończeniu partii i gotowości do odbioru towaru, bez udziału operatora. W bardziej zaawansowanych systemach AMR otrzymują również parametry dotyczące priorytetu zadania, wymaganej temperatury transportu czy lokalizacji odbioru, przesyłane w czasie rzeczywistym z poziomu systemu SCADA lub bezpośrednio z urządzenia. Komunikacja taka opiera się na technologiach takich jak LIDAR, systemy wizyjne, BLE (Bluetooth low energy), Wi-Fi 6 czy UWB (ultra-wideband).
AGV i AMR są coraz częściej integrowane z systemami zarządzania zadaniami Fleet Management System (FMS), które optymalizują rozkład zadań między pojazdami, analizując ich pozycję, stan naładowania baterii i dostępność zasobów.
Integracja z MES, WMS i ERP
Zlecenie produkcyjne z systemu ERP trafia do MES, a następnie do WMS, który identyfikuje potrzebne komponenty. System FMS otrzymuje precyzyjne polecenie z WMS, a po wykonaniu zadania przesyła informację zwrotną. Ten łańcuch wymaga sprawnej komunikacji i dobrze zaprojektowanej architektury danych. Współczesne platformy FMS najczęściej udostępniają API, a popularne są również middleware, tłumaczące dane z jednego formatu na drugi.
W odpowiedzi na brak wspólnych standardów, niemiecki przemysł motoryzacyjny opracował standard VDA 5050 - otwarty protokół komunikacji między systemami FMS a flotą pojazdów różnych producentów. Integracja z systemami IT to także rejestrowanie danych do celów analitycznych, które mogą być podstawą predykcyjnego planowania zasobów i wykrywania wąskich gardeł.
Przyszłość samojezdnych wózków transportowych
Autonomiczne wózki transportowe wciąż znajdują się na etapie rozwoju, a w niedalekiej przyszłości można się spodziewać jeszcze bardziej doskonałych rozwiązań. Szybkie, precyzyjne i bezkonfliktowe wyznaczanie tras pozostanie na czele wymagań stawianych pojazdom AMR, jednak coraz bardziej istotna będzie także wysoka przepustowość systemu transportowego w zakładach z dużą flotą tego typu wózków. Z całą pewnością w tym właśnie kierunku będzie zmierzał transport wewnątrzzakładowy.
Pojazdy AGV i AMR przestały być ciekawostką technologiczną, stając się narzędziem transformacji procesów wewnętrznych w przemyśle. Ich siła leży nie tylko w samodzielnym przemieszczaniu się, ale przede wszystkim w zdolności do płynnej i inteligentnej komunikacji z maszynami i systemami IT.