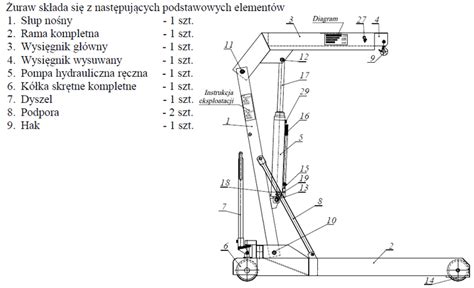
Żurawie samojezdne to kluczowe maszyny w wielu sektorach przemysłu, od budownictwa po logistykę, gdzie wymagane jest podnoszenie ciężkich ładunków. Ich bezpieczna i efektywna praca jest ściśle związana ze stabilnością, którą zapewniają przede wszystkim wysuwane podpory. Monitorowanie tych podpór oraz zarządzanie obciążeniem są fundamentalne dla zapobiegania przewróceniu i zapewnienia maksymalnego dopuszczalnego udźwigu. Współczesne technologie sensorowe odgrywają tu niezwykle ważną rolę, choć dane wejściowe skupiają się na czujnikach przemieszczenia podpór, a nie czujnikach nacisku.
Znaczenie podpór w stabilności żurawi mobilnych
W przypadku żurawi montowanych na ciężarówkach oraz podnośników i podnoszonych platform roboczych,
boczne podpory są montowane w celu zapobiegania przewróceniu. Żuraw lub platforma może zostać uruchomiona tylko wtedy, gdy podpory są
całkowicie wysunięte, dzięki czemu nie ma niebezpieczeństwa przewrócenia się w przypadku długich ram wysuwanych.
Często jednak pełne wysunięcie podpór nie jest możliwe ze względów przestrzennych. W takich sytuacjach niezbędne jest dynamiczne dostosowanie limitu momentu obciążenia do rzeczywistego obszaru podparcia, co wymaga precyzyjnego pomiaru stopnia wysunięcia podpór.
Monitorowanie wysunięcia podpór za pomocą czujników przemieszczenia
W celu pomiaru stopnia wysunięcia podpór stosowane są różnorodne technologie sensorowe. Tekst wejściowy opisuje zastosowanie czujników linkowych oraz czujników laserowych scanCONTROL.
-
Czujniki linkowe
Do pomiaru stopnia wysunięcia podpór wykorzystywane są czujniki linkowe firmy Micro-Epsilon. Dzięki temu uzyskuje się dynamiczny limit momentu obciążenia w rzeczywistym obszarze podparcia. Te sensory pozwalają na skrócenie czasu postoju transporterów żużla podczas załadunku i rozładunku, ponieważ transporter może rozpocząć jazdę wcześniej, w zależności od stanu załadunku, bez czekania na sygnał wyłącznika krańcowego.
W kontekście bezpieczeństwa żurawia montowanego na ciężarówce, dynamiczny proces pomiaru stopnia wysunięcia podpór żurawia ułatwia obliczenie dopuszczalnego udźwigu. Aktualna długość wysięgnika jest również ważna przy obliczaniu momentu obrotowego ładunku na żurawiu i jest mierzona za pomocą zintegrowanego czujnika linkowego. Ta prosta i teleskopowa zasada pomiaru sprawia, że czujniki linkowe są predestynowane do tego zadania.
-
Czujniki laserowe scanCONTROL
W niektórych zastosowaniach, takich jak ramiona robotów, gdzie wymagany jest pomiar przeszkód, zastosowano czujniki scanCONTROL 2600. Tworzą one barierę powyżej lub poniżej detektora w zależności od kierunku wspinaczki. Ze względu na rozmiar czujnika wymagany jest odpowiednio duży zakres pomiarowy wynoszący 100 mm w kierunkach X i Z. Czujniki są umieszczane bezpośrednio na ramieniu robota w pobliżu detektora, co jest możliwe dzięki kompaktowej obudowie czujnika i niskiej wadze (zaledwie 380 gramów). System pomiarowy jest prawie niewrażliwy na spadający kurz i brud, a także na wodę, wilgoć, wibracje i wstrząsy. Ręczne wyłączanie lasera zapewnia dodatkowe bezpieczeństwo podczas obsługi robota.
Nowoczesne żurawie samojezdne - przykład Liebherr LTM 1100-5.3
Żuraw samojezdny Liebherr LTM 1100-5.3 stanowi doskonały przykład zastosowania zaawansowanych technologii w celu optymalizacji stabilności i udźwigu. Ten model oferuje potężny 62-metrowy wysięgnik teleskopowy i przewozi do 16,9 ton balastu przy 12-tonowym nacisku na oś na drogach publicznych. Jest to drugi żuraw w ofercie Liebherr wyposażony w nowy system sterowania LICCON3 oraz pierwszy na świecie 5-osiowy żuraw o szerokości 2,55 metra.
LTM 1100-5.3 cechuje się przede wszystkim lekką konstrukcją, która umożliwia przewiezienie jak największej ilości balastu przy 12-tonowym obciążeniu osi, oraz osiągnięcie jak najmniejszych obciążeń osi poprzez zmniejszenie balastu. Żuraw LTM 1100-5.3 może poruszać się również z obciążeniem osi wynoszącym zaledwie 9 ton na oś, co oznacza, że może mieć zastosowanie na całym świecie. Nawet w krajach, gdzie dopuszczalny jest nacisk na oś wynoszący 12 ton, żurawie z małym naciskiem na oś i małą masą całkowitą są pożądane. Codzienne warunki często wymagają zmniejszenia masy, na przykład podczas przejazdów przez mosty i w centrach miast.
Z balastem 0,8 tony LTM 1100-5.3 osiąga masę całkowitą 44 tony przy nacisku na oś 9 ton. Z balastem 4,4 tony może podróżować z obciążeniem osi 10 ton i masą całkowitą 48 ton. Przy obciążeniu osi 12 ton nowy 100-tonowy żuraw może udźwignąć do 16,9 ton przeciwwag. Przy 75 procentach maksymalnego balastu 22,5 tony - to nowy rekord dla żurawi samojezdnych na całym świecie. Dzięki temu nowy LTM 1100-5.3 może wykonywać większość swoich zadań jako dźwig typu taxi, bez dodatkowego transportu balastu. Nawet przy maksymalnym obciążeniu obciążenie osi 13,4 tony jest niskie i równomiernie rozłożone na wszystkie osie.
Systemy zarządzania stabilnością
Nowy 100-tonowy żuraw oferuje dodatkowe bezpieczeństwo, elastyczność i udźwig dzięki systemowi zmiennych podpór VarioBase. Większą elastyczność na placu budowy zapewnia również standardowy system VarioBallast, który umożliwia regulację promienia balastu w zakresie od 4 do 5,1 metra. Te systemy, w połączeniu z danymi z czujników przemieszczenia podpór i wysięgnika, pozwalają na precyzyjne obliczanie dopuszczalnego momentu obciążenia i maksymalizację wydajności przy zachowaniu bezpieczeństwa.
Liebherr – LTM 1100-5.3 – Mistrz wszystkich dróg
System sterowania żurawiem LICCON3
Trzecia generacja systemu LICCON (Liebherr Computed Control) opiera się na sprawdzonych funkcjach sterowania, ale zawiera również zupełnie nowy pakiet oprogramowania i język programowania, a także szybszą magistralę danych, znacznie większą przestrzeń dyskową i większą moc obliczeniową. Operatorzy przyzwyczajeni do poprzedniego systemu sterowania, szybko i łatwo opanują również nową wersję. Zastosowano sprawdzone komponenty sprzętowe, takie jak mobilna jednostka sterująca i wyświetlacz BTT. Funkcja ekranu dotykowego na nowym dużym wyświetlaczu w kabinie nadbudowy oznacza, że sterowanie jest teraz jeszcze łatwiejsze i wygodniejsze. Zmieniono i uproszczono również sposób przedstawiania informacji. Ponadto żurawie LICCON3 są standardowo przygotowane do telemetrii i zarządzania flotą, co pozwoli w przyszłości przeglądać i oceniać istotne dane za pomocą portalu klienta MyLiebherr.
Monitorowanie w innych zastosowaniach przemysłowych
Monitorowanie ruchu lub pozycji jest wymagane ze względów funkcjonalnych i bezpieczeństwa w wielu technologiach podnoszenia oraz maszynach mobilnych. Zsynchronizowane systemy podnoszenia umożliwiają podnoszenie i opuszczanie ciężkich ładunków kontrolowanych pod względem odległości i siły lub kontrolowane podawanie do przodu dużych komponentów. Aby to osiągnąć, osiem lub więcej siłowników jest podłączonych do centralnego wysokociśnieniowego układu hydraulicznego (700 barów). Przemieszczenie każdego pojedynczego cylindra musi być mierzone jako rzeczywista wartość dla zsynchronizowanego ruchu i dostarczane do sterownika zamkniętej/otwartej pętli, gdzie często stosowane są czujniki linkowe.
tags: #czujnik #nacisku #podpor #zuraw #samojezdny