Ciągnik domowej produkcji, znany potocznie jako SAM (lub samopał, papaj), to autarkiczny pojazd, najczęściej samochód, motocykl lub ciągnik, wykonany samodzielnie lub w warsztacie. Zazwyczaj powstaje w jednym egzemplarzu, choć rzadziej może być produkowany w małej serii. Główną przyczyną jego powstawania były wieloaspektowe niedostatki w zaopatrzeniu indywidualnych gospodarstw rolnych, co wymuszało samodzielne tworzenie maszyn roboczych. Budowa SAM-a często polega na gruntownej przeróbce seryjnego pojazdu lub stworzeniu go od podstaw, z wykorzystaniem wielu podzespołów pochodzących z pojazdów seryjnych.
W Polsce, zgodnie z ustawą Prawo o ruchu drogowym, pojazd marki „SAM” jest definiowany jako pojazd zbudowany przy wykorzystaniu nadwozia, podwozia lub ramy, o konstrukcji własnej. Nazwa „SAM” wywodzi się od popularnego w latach 50. XX wieku.
Historia i Rozwój Ciągników SAM
Konstrukcje typu SAM są użytkowane w wielu krajach, w tym w Czechach, na Słowacji, na Ukrainie i w Chinach, a także jednostkowo w Niemczech czy Stanach Zjednoczonych. Szczególnie po zakończeniu II wojny światowej w krajach takich jak Niemcy, Francja, Włochy, Austria czy Norwegia, budowano SAM-y na bazie adaptacji samochodów-furgonów. Polegało to na odcinaniu tylnej części pojazdu, dodawaniu drugiej skrzyni biegów w celu zwiększenia przełożenia i montażu większych kół z rolniczym ogumieniem.
W Polsce pierwsze ciągniki typu SAM pojawiły się po zakończeniu II wojny światowej. Ich budowa bazowała na częściach pozostałych lub porzuconych pojazdów wojskowych, takich jak Dodge'e, Willysy, a nawet motocykle. Ze względu na wyeksploatowanie i późniejszą likwidację, w Polsce nie zachowały się maszyny starsze niż te zbudowane po 1950 roku. W kolejnych dekadach do budowy SAM-ów wykorzystywano głównie silniki rolnicze, części i podzespoły z różnych pojazdów, w tym maszyn rolniczych, a także części ciągnikowe i motocyklowe. Rzadko stosowano fabrycznie nowe części.
Znaczny rozwój produkcji pojazdów autarkicznych nastąpił w latach 60. XX wieku, a apogeum ich rozwoju przypadło na lata 70. i 80. XX wieku. W 1984 roku indywidualni rolnicy wykupili 94% polskiej produkcji silników rolniczych małej mocy, z czego większość przeznaczono właśnie do budowy SAM-ów. Jedną z przyczyn zapotrzebowania na samopały były działania władz PRL, które torpedowały udane konstrukcje krajowe (np. Ursus „U”), jednocześnie fatalnie przygotowując produkcję licencyjną (Massey Ferguson).
SAM-y były najczęściej budowane przez lokalnych rzemieślników, często na bazie dawnych zakładów kowalskich, a także przez chłopów na własny użytek lub dla sąsiadów. Najbardziej płodni wytwórcy, utrzymujący się z budowy samopałów, stworzyli w ciągu swojej działalności po około trzysta pojazdów. Do takich twórców należeli m.in. Józef Mucha z Tarnowa czy Tadeusz Ząbek z Łącka.
W latach 80. XX wieku w Polsce, według różnych szacunków, użytkowano od 30 do 100 tysięcy takich maszyn. Z wyjątkiem Podhala i okolic Krosna, nie były to pojazdy nigdzie rejestrowane.
Budowa i Charakterystyka Techniczna Ciągników SAM
Po 1989 roku, w warunkach dalszych niedostatków ekonomicznych na wsi, produkcja SAM-ów nie ustała. Zaczęto wówczas w większym stopniu stosować części od zagranicznych producentów. Kres masowej budowie pojazdów autarkicznych położył atrakcyjny finansowo import używanych ciągników z zagranicy.
Dziś SAM-y nadal są eksploatowane, a w latach po roku 2000 przesunęły się one do gospodarstw, które wcześniej korzystały wyłącznie z siły zwierząt pociągowych lub nie posiadały żadnej siły roboczej. Rozkład zjawiska eksploatacji SAM-ów na mapie Polski pokrywa się z obszarami o najbardziej rozdrobnionym rolnictwie. Najwięcej tych maszyn było użytkowanych na południu kraju, zwłaszcza na podgórzach, a najmniej w Polsce zachodniej, gdzie zjawisko to było miejscami nieznane. Regionami o znacznym wykorzystaniu SAM-ów były Małopolska i Polska centralna, w tym Radomskie.
Przykład Budowy Ciągnika SAM
Przykładem kreatywności i zaradności jest ciągnik SAM zbudowany przez Damiana Kujawę z rodzicami, prowadzących niewielkie gospodarstwo rolne w Kozich Laskach (powiat nowotomyski, woj. wielkopolskie). Inspiracją dla wyglądu tego ciągnika był niemiecki traktor UT082, produkowany w latach 1984-1989. Podobieństwo między tymi maszynami jest wyraźne.
Konstrukcja opiera się w dużej mierze na częściach wykonanych samodzielnie oraz elementach z odzysku, często pozyskiwanych ze złomu. Główną konstrukcję nośną stanowi rama wykonana z grubej, giętej i spawanej blachy. W tym konkretnym przypadku zastosowano drugą ramę nośną.
Jednostką napędową jest 4-cylindrowy silnik wysokoprężny o pojemności 1,8 litra produkcji Forda, pochodzący z modelu Ford Escort, ale stosowany również w innych modelach tej marki. Fabryczna moc silnika wynosiła 75 KM, jednak po modyfikacjach, polegających na usunięciu turbosprężarki, moc została obniżona do około 60 KM. Usunięcie turbosprężarki ułatwiło montaż jednostki i zmniejszyło jej wysilenie, a moc na obecnym poziomie jest uznawana za wystarczającą.
Silnik jest mocowany do ramy przy użyciu seryjnych poduszek, co redukuje poziom wibracji przenoszonych na ramę i operatora, zwiększając komfort pracy. Wyzwaniem okazał się jednak układ wydechowy. Początkowo stosowane tłumiki z innych ciągników, ze względu na ich dużą masę i silną pracę silnika na poduszkach, notorycznie się łamały. Ostatecznie zastosowano lekką rurę ze stali kwasoodpornej.
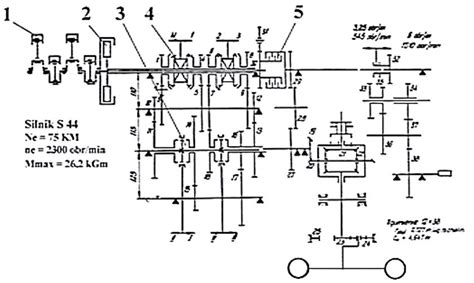
Rozwiązanie przełożeń w tym ciągniku jest przykładem kreatywności. Silnik współpracuje ze skrzynią biegów z Opla Omegi, która wstępnie redukuje obroty i zwiększa moment obrotowy. Bezpośrednio na wyjściu ze skrzyni do wału napędowego zamontowano łącznik elastyczny, przekazujący napęd do tylnego mostu pochodzącego z dużego wózka widłowego. Most ten dysponuje dwoma zakresami prędkości oraz rewersorem.
Zastosowanie dwóch skrzyń biegów jest uzasadnione znacznymi różnicami w zakresie obrotowym i specyfice oddawania mocy między silnikami samochodów osobowych a potrzebami prac polowych. Jedna skrzynia biegów mogłaby skutkować zbyt wysokimi prędkościami przy niewystarczającym momencie obrotowym do prac polowych. Kombinacja dwóch skrzyń biegów zapewnia łącznie 12 przełożeń do przodu oraz, dzięki rewersorowi w tylnym moście, 12 przełożeń do tyłu. Dźwignia zmiany kierunku jazdy została sprytnie przeniesiona za pomocą cięgien w pobliże kierownicy. Na najwyższym biegu ciągnik SAM osiąga prędkość około 25 km/h.
Prace Polowe i Osprzęt
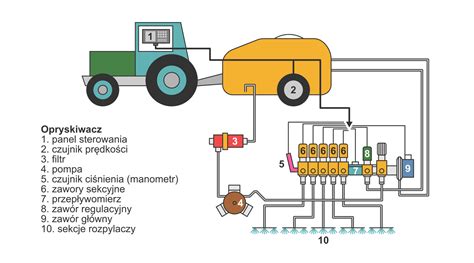
Głównym zadaniem, jakie ciągnik wykonuje w gospodarstwie pana Damiana, jest praca z ładowaczem czołowym. Poza produkcją roślinną, rodzina zajmuje się również hodowlą bydła opasowego. Cały ładowacz wraz z osprzętem został wykonany własnoręcznie przez pana Damiana przy użyciu prostych narzędzi ręcznych, a jego jakość wykonania dorównuje produktom fabrycznym.
Udźwig ładowacza, jak na tak mały ciągnik, jest imponujący - bez większych problemów radzi sobie z ciężarami rzędu 350 kg, co nie stanowi jego granicy. Początkowo ciągnik wykorzystywał inny ładowacz z grubszymi siłownikami i pracował na ciśnieniu w układzie hydraulicznym rzędu 150 bar.
Na uwagę zasługuje również mocny, tylny TUZ (trzypunktowy układ zawieszenia). Bazuje on na podzespołach z Ursusa C-360, jednak za podnoszenie odpowiada siłownik z pługa PHX. Tak duże udźwigi ładowacza czołowego oraz tylnego TUZ-a doprowadziły do przeciążenia całego ciągnika i zniszczenia ramy nośnej. Po tym zdarzeniu maszyna otrzymała nową, mocniejszą ramę i zbudowano nowy ładowacz. Aby zapobiegać podobnym sytuacjom w przyszłości, ograniczono ciśnienie w układzie do 120 bar, a siłowniki wymieniono na mniejsze.
Ciągnik posiada dwa niezależne układy hydrauliczne. Przednia oś to skrócona i lekko zmodyfikowana oś od Tarpana, dzięki czemu ciągnik hamuje na wszystkie cztery koła, co jest kluczowe przy pracy z ładowaczem, gdy tył jest mocno odciążony. Układ wyposażono również w serwo hamulcowe, co znacząco zmniejsza siłę nacisku na pedał hamulca.
Komfort pracy poprawia zastosowanie hydraulicznego pedału sprzęgła oraz oświetlenie LED.

Współczesne Rozwiązania Autonomiczne w Rolnictwie
Obecnie ciągniki „SAM” są wykorzystywane głównie w rolnictwie i ogrodnictwie, najczęściej bez homologacji i rejestracji, co oznacza, że nie są dopuszczone do ruchu drogowego po drogach publicznych. Rejestracja pojazdu wymaga przejścia badań technicznych, których zakres określają odpowiednie przepisy.
Zainteresowanie ciągnikami SAM wśród etnologów i turystów w Polsce datuje się od lat 70. XX wieku. Pierwszą publiczną prezentacją SAM-ów była wystawa ciągników chłopskich w Czorsztynie w 1973 roku. Największą polską kolekcją SAM-ów dysponuje Muzeum Wsi Radomskiej w Radomiu.
Współczesne rolnictwo coraz śmielej wkracza w erę cyfryzacji i automatyzacji, czego przykładem są autonomiczne ciągniki i roboty rolnicze. Koncepcja "Rolnictwa 5.0" przestaje być jedynie hasłem konferencyjnym, stając się realnymi rozwiązaniami, które trafiają na pola i do terminali w kabinach maszyn.
Autonomiczne Ciągniki i Roboty
Międzynarodowe spotkania, takie jak festiwal "Farming Red" w Austrii, pokazują postęp w dziedzinie autonomicznych maszyn. Firma Case IH zaprezentowała tam działający autonomiczny ciągnik serii Magnum, wyposażony w kamery, czujniki i radary systemu Raven. W Stanach Zjednoczonych maszyny Case IH (ciągnik i rozsiewacz samojezdny Trident) oraz ciągniki New Holland już jeżdżą po polach, wykorzystując system autonomiczny.
Rozsiewacz serii Trident o mocy 390 KM był pierwszym autonomicznym rozsiewaczem w branży rolniczej na świecie. Ciągnik Case IH Magnum z systemem Raven Autonomy oferuje pełną kontrolę nad prędkością pojazdu, jego zadaniami i innymi parametrami. System ten posiada specjalny pakiet oprogramowania do naprowadzania i sterowania, kontroli napędu, percepcji i planowania ścieżki. Operatorzy mogą zaplanować i wykonać całą operację polową z urządzenia mobilnego, w oparciu o zmapowane granice pola. W przypadku problemów, traktor zatrzymuje się i wysyła powiadomienie do zdalnego operatora. Obecnie system nie jest jeszcze gotowy do sprzedaży, głównie ze względu na przepisy prawne, które nie nadążają za rozwojem technologii.
🇬🇧 First Case IH with Raven Autonomy in Europe with Väderstad TopDown
Zaawansowane Systemy Automatyzacji
Warto rozważyć, czy budowa własnego, unikalnego ciągnika SAM jest opłacalna w porównaniu do zakupu gotowych rozwiązań. "Majsterkowanie jest moją ogromną pasją" - podkreśla Damian Kujawa, który wraz z ojcem prowadzi gospodarstwo rolne nastawione na produkcję bydła mięsnego oraz trzody chlewnej. Ukończył inżynierię rolniczą, co świadczy o jego profesjonalnym podejściu do tematu.
Rolnictwo 5.0 to odpowiedź na przyziemne problemy gospodarstwa. Autonomia i systemy oparte na danych nie mają zastąpić zdrowego rozsądku rolnika, lecz odciążyć go od powtarzalnych, czasochłonnych czynności i ograniczyć straty.
Kuhn Aura to przykład wyspecjalizowanego robota żywieniowego, który stanowi samodzielną maszynę, a nie dodatek do ciągnika. Jest to pełny cykl bez operatora. W gospodarstwie Gaec Corderie we Francji Aura przepracowała 3688 godzin w ciągu roku, rozdzielając ponad 3,2 miliona kg mieszanek, ze średnim zużyciem paliwa 3,7 l na godzinę. Maszyna jest gotowa do pracy w istniejącej infrastrukturze, korzysta z RTK GPS i posiada zaawansowane systemy czujników (ruchu, radar, laser, ultradźwięki) zapewniające bezpieczeństwo.
Claas, we współpracy z AgXeed, obrał inną drogę. Zamiast budować osobnego robota, opracowano moduł VCU (Vehicle Control Unit), który montuje się na istniejącym ciągniku. Jest to autonomia poziomu drugiego, gdzie ciągnik sam prowadzi maszynę, zarządza przejazdami, skrzynią biegów, hydrauliką i podnośnikami. Operator siedzi w kabinie, ale nie trzyma kierownicy. Kluczowe jest planowanie pracy w portalu Claas Connect, gdzie wyznacza się granice pola, parametry narzędzia i sposób zawracania. System generuje algorytmiczny plan pracy, eliminując improwizację.
Koszt jednostki sterującej od AgXeed to około 10 tys. euro (bez anteny RTK) lub 12,5 tys. euro (z anteną), wliczając roczną subskrypcję danych. Jest to rozwiązanie pomostowe.
Pełną autonomię w polu oferuje ciągnik AgBot 5.115T od AgXeed. Jest to maszyna o mocy 115 kW, z silnikiem Deutz 4,1 l i elektrycznym układem przeniesienia napędu, pracującym w zakresie od 0 do 13,5 km/h. Naprowadzanie odbywa się z dokładnością do 2,5 cm dzięki RTK GNSS. Bezpieczeństwo zapewniają czujniki LIDAR, radarowe i ultradźwiękowe oraz czuły zderzak. Maszyna nie może poruszać się po drogach publicznych, wymaga transportu na pole lawetą.
Kubota i Kverneland prezentują ciekawy kierunek w zestawie z ciągnikiem M7 czwartej generacji i rozsiewaczem DSX-W Geospread, wykorzystując system TIM (Tractor Implement Management). Rozsiewacz z czujnikami ultradźwiękowymi kontroluje wysokość pracy tarcz, kompensuje zmieniającą się masę nawozu i koryguje nachylenie w czasie rzeczywistym. System zapewnia stałe obroty WOM i poziom maszyny przez hydrauliczny łącznik centralny. Jest to zaawansowana automatyzacja procesu nawożenia, nie pełna autonomia, która pozwala na precyzyjne dawkowanie, współpracę z GPS, kontrolę sekcji i zmienne dawkowanie, ograniczając straty nawozu i błędy operatora.
Amazone AutoTill pokazuje, jak budować autonomię w uprawie gleby krok po kroku. Rozwiązanie dostępne w kultywatorach Cenio i Cenius umożliwia automatyczne ustawienie maszyny według zdefiniowanych parametrów (głębokość robocza, prędkość) oraz stałe monitorowanie pracy. Czujniki kontrolują rzeczywistą głębokość pracy i reagują na odchylenia. W pierwszym etapie AutoTill działa z klasycznym ciągnikiem przez ISOBUS, ostrzegając operatora o zatorach czy nieprawidłowościach. W kolejnym etapie, po połączeniu z modułem sterującym AgXeed, system podejmuje reakcję na podstawie danych z czujników. Najdalej idąca konfiguracja zakłada współpracę z robotem polowym, gdzie kultywator komunikuje się z jednostką napędową przez ISOBUS, monitoruje proces uprawy i przekazuje informacje o sposobie rozwiązania problemu.
Lemken zdobywa doświadczenie dzięki robotowi VTE i rozwija systemy kamer oraz czujników do upraw roli. Krone i Lemken pokazują, że droga do autonomii wiedzie przez czujniki i analizę danych. Dane trafiają na terminal ISOBUS, a w zestawach autonomicznych do interfejsu HMI, co przekłada się na wcześniejsze wykrywanie zatorów, stałą jakość zagęszczenia i mniej przestojów. Krone rozwija czujniki wibracji w kosiarkach, automatyczne sterowanie sekcjami i rozwiązania oparte na kamerach do kontroli wysokości koszenia.
Valtra posiada w swoich ciągnikach niemal komplet narzędzi potrzebnych do pracy autonomicznej. System Valtra Guide prowadzi maszynę z dokładnością centymetrową, AutoTurn odpowiada za automatyczne zawracanie na uwrociach, ISOBUS pozwala sterować narzędziem (w tym zmienną dawką i głębokością pracy), a panel SmartTouch integruje zarządzanie całym zestawem. Do tego dochodzi dwukierunkowa wymiana danych przez TaskDoc, umożliwiająca planowanie i analizę zabiegów. Z technicznego punktu widzenia ciągnik mógłby pracować sam, jednak praktyka pokazuje, że pole wciąż potrafi zaskoczyć nieprzewidzianymi przeszkodami.
Najbardziej zaawansowane podejścia do autonomii można podzielić na dwa główne kierunki: wyspecjalizowane roboty procesowe (jak Kuhn Aura), które przejmują cały, powtarzalny cykl w gospodarstwie, oraz rozwiązania budujące most między klasycznym ciągnikiem a pełną autonomią (jak Claas). Rolnictwo 5.0 to mozaika rozwiązań, gdzie kluczowa może być autonomia w oborze, robot w polu, lub precyzyjne nawożenie sterowane algorytmem. Kierunek jest jednak wspólny: coraz więcej decyzji przejmują systemy, a rola rolnika przesuwa się z operatora na menedżera procesu.