Precyzyjne sterowanie tylnym podnośnikiem (TUZ) w ciągniku rolniczym jest kluczowe dla efektywności i jakości prac polowych. Wraz z rozwojem technologii, mechaniczne systemy sterowania ewoluowały w kierunku zaawansowanych układów elektrohydraulicznych, oferujących operatorom znacznie większą kontrolę i komfort. Niniejszy artykuł przybliża koncepcje sterowania pozycyjnego i siłowego, omawiając zarówno próby budowy własnych rozwiązań, jak i zaawansowane fabryczne systemy, takie jak EHR.

Samodzielna Budowa Elektrycznego Sterowania Podnośnikiem
Wielu operatorów, dążąc do zwiększenia komfortu pracy i precyzji, rozważa modyfikacje swoich maszyn. Przykładem jest projekt użytkownika ciągnika Belarus 920, który chciał zbudować układ sterujący dźwignią podnoszenia i opuszczania tylnym podnośnikiem. Gotowe sterowniki i układy dostępne na rynku, o cenie rzędu 2500-3000 zł, często są poza zasięgiem finansowym, a ich zaawansowane funkcje, takie jak serwomechanizmy, mogą wydawać się zbędne dla podstawowych potrzeb.
Planowane Komponenty i Wyzwania w Projekcie DIY
- Siłownik elektryczny (liniowy): Jako element wykonawczy. Jego szybkość wysuwu i maksymalne obciążenie są kluczowe. Użytkownik zamierzał dobrać siłownik o skoku 10-15 cm, który idealnie odpowiadałby skokowi wajchy. Siłowniki liniowe posiadają własne krańcówki wobec swojego skoku, eliminując potrzebę zewnętrznych ograniczników ruchu.
- Potencjometr: Początkowo planowany do regulacji prędkości pracy siłownika za pomocą obniżenia napięcia. Jednak w dyskusji zwrócono uwagę, że do regulacji prądu silnika siłownika bardziej odpowiedni byłby regulator prądu (np. PWM), a sama prędkość ruchu TUZ zależy od prędkości przepływu płynu hydraulicznego, czyli stopnia otwarcia zaworu sterującego, a nie prędkości jego otwierania. Jeśli zawór nie jest zero-jedynkowy, kluczowa staje się pozycja wychylenia siłownika elektrycznego.
- Dźwignia/Joystick/Przycisk: Największym wyzwaniem okazał się wybór przełącznika. Użytkownik poszukiwał przełącznika, który ma 5 pozycji:
- Pozycja neutralna (środkowa).
- Dwie pozycje chwilowe (jedna w górę, druga w dół): Odpowiadające za chwilowe poruszanie się siłownika w jedną lub drugą stronę (tak długo, jak przycisk jest trzymany), co służy do precyzyjnej regulacji głębokości podczas prac.
- Dwie pozycje stałe (jedna w górę, druga w dół): Odpowiadające za całkowite wysunięcie lub wsunięcie siłownika do krańcówek, czyli pełne podniesienie lub opuszczenie maszyny bez konieczności trzymania przycisku. Ta funkcja jest przydatna na uwrociach, umożliwiając operatorowi jednoczesną zmianę biegów lub kierowanie.
Kwestie Bezpieczeństwa i Ergonomii
W kontekście przełącznika 5-pozycyjnego, uczestnicy dyskusji podnosili kwestię bezpieczeństwa. Automatyczne ruchy do krańcówek, choć wygodne, mogą być niebezpieczne. Sugerowano zabezpieczenie tych skrajnych pozycji przed przypadkowym załączeniem, np. poprzez użycie przycisków zagłębionych lub kombinacji joysticka 3-pozycyjnego z dwoma oddzielnymi przyciskami. Autor projektu argumentował, że przypadkowe włączenie jest ryzykiem inherentnym dla pracy z maszyną rolniczą, gdzie nawet manualne trącenie dźwigni może spowodować ruch, a celem jest zwiększenie komfortu, niekoniecznie całkowita eliminacja ryzyka. Zaletą takiego rozwiązania jest możliwość jednoczesnego zajmowania się zmianą biegów czy kierownicą w czasie podnoszenia maszyny.
Sterowanie Siłownikiem i Zabezpieczenia
Do sterowania siłownikiem elektrycznym, zwłaszcza w kontekście zmiany kierunku, niezbędny jest mostek H. Może być on zbudowany na tranzystorach lub przekaźnikach. Kluczowe jest dobranie go do obciążenia, tj. do mocy silnika siłownika, w tym w pozycji mechanicznie zblokowanej. Obowiązkowe jest zastosowanie bezpiecznika, aby zapobiec zwarciom w przypadku awarii lub usterki. Dodatkowo, ważne jest zabezpieczenie przed jednoczesnym załączeniem obu gałęzi mostka oraz uwzględnienie czasu przerwy (np. 200-300 ms) pomiędzy przełączeniem prawo-lewo, aby każdy mechanizm, w tym siłownik, miał czas na zatrzymanie się.
Scissor Lift Table
Ewolucja Sterowania Podnośnikiem: Od Mechaniki do EHR
Zanim systemy elektroniczne zagościły w ciągnikach, operatorzy sterowali trzypunktowym układem zawieszenia (TUZ) mechanicznie, ręcznie operując dźwigniami. Wymagało to znacznej siły i precyzji, której trudno było osiągnąć w powtarzalny sposób. Ustawienie głębokości pracy czy wysokości podnoszenia było często kwestią "czucia" i doświadczenia. Współczesne rolnictwo, dążąc do efektywności i precyzji, wprowadziło innowacyjne rozwiązania, takie jak EHR.
Czym jest system EHR w ciągniku?
EHR to skrót od niemieckiego "Elektronische Hubwerksregelung", co w tłumaczeniu z języka niemieckiego oznacza Elektrohydrauliczne Sterowanie Podnośnikiem. Jest to rozwiązanie, które stało się standardem w nowoczesnych maszynach rolniczych, rewolucjonizując sposób obsługi narzędzi zawieszanych.
Jak działa system EHR?
W sercu systemu EHR znajduje się panel sterujący w kabinie, będący głównym interfejsem operatora z podnośnikiem. Składa się on z intuicyjnych pokręteł i przycisków, które pozwalają na precyzyjne ustawienie parametrów, takich jak głębokość pracy, wysokość podnoszenia, szybkość reakcji czy czułość regulacji. Dzięki temu operator ma pełną kontrolę nad narzędziem bez konieczności odrywania wzroku od pola.
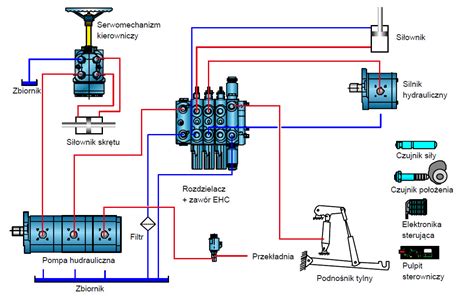
Kluczową rolę odgrywają również czujniki. Przede wszystkim są to czujniki siły, często w postaci sworzni tensometrycznych umieszczonych na dolnych cięgłach TUZ, mierzące opór, jaki stawia narzędzie podczas pracy w glebie. Równie ważny jest czujnik położenia, który informuje system o aktualnej wysokości ramion podnośnika. Te komponenty nieustannie zbierają dane o warunkach pracy, przekazując je do sterownika (ECU). ECU przetwarza sygnały zarówno z panelu sterującego, jak i z czujników. Na podstawie tych danych sterownik wysyła precyzyjne polecenia do elektrozaworów, które regulują przepływ oleju hydraulicznego do siłowników podnośnika, zamieniając elektroniczne komendy w fizyczne działanie - podnoszenie, opuszczanie lub utrzymywanie narzędzia w zadanej pozycji. To właśnie ta cyfrowa precyzja odróżnia EHR od starszych rozwiązań mechanicznych.
Kluczowe Tryby Pracy EHR
System EHR oferuje kilka trybów pracy, które można dostosować do specyfiki wykonywanych zadań:
- Regulacja Siłowa (Draft Control):
Głównym zadaniem regulacji siłowej jest utrzymanie stałego oporu roboczego (siły uciągu), niezależnie od zmienności gleby. Jeśli narzędzie (np. pług) napotka twardszą ziemię, system automatycznie skoryguje głębokość pracy, lekko podnosząc narzędzie, aby utrzymać zadany opór. Jest to funkcja absolutnie kluczowa podczas orki, ponieważ zapewnia równomierną głębokość pracy i optymalne obciążenie ciągnika, co przekłada się na niższe zużycie paliwa i mniejsze obciążenie silnika. W ciągnikach z czujnikiem ściskania łącznika górnego, zalecane jest ustawienie łącznika jak najbardziej poziomo. Wadą jest znacznie zwiększone ryzyko urwania lemiesza na kamieniach. Czułość działania w panelu EHR jest zazwyczaj przeprowadzana za pomocą dodatkowego pokrętła.
- Regulacja Pozycyjna (Position Control):
W tym trybie system utrzymuje narzędzie na stałej, zadanej wysokości względem ciągnika. Niezależnie od nierówności terenu, ramiona podnośnika starają się utrzymać maszynę na wybranej pozycji. Ten tryb jest idealny do pracy z narzędziami wymagającymi stałej wysokości, takimi jak rozsiewacze nawozów, opryskiwacze czy siewniki, gdzie precyzyjne ustawienie ma wpływ na równomierny rozkład materiału. Regulacja pozycyjna, w przeciwieństwie do siłowej, kopiuje pozycję ciągnika, co oznacza, że dobre rezultaty osiąga się, gdy ciągnik jedzie obok bruzdy. Jeśli ciągnik jedzie w bruździe, na końcu pola pług może wypłycać orkę. W tym trybie pompa nie wyje i jest stabilna.
- Regulacja Mieszana (Mixed Control):
Ten tryb stanowi połączenie cech regulacji siłowej i pozycyjnej. Operator może ustawić proporcje, w jakich system ma reagować na zmiany oporu i wysokości. Zapewnia to elastyczność i pozwala na znalezienie optymalnego kompromisu między precyzyjnym utrzymaniem głębokości a stałym obciążeniem silnika, co jest przydatne w zmiennych warunkach polowych, np. podczas uprawy przedsiewnej. Ustawienie łącznika górnego jest podobne jak w regulacji siłowej. W układach sterowanych za pomocą EHR jest regulowane jednym pokrętłem, gdzie położenie wskaźnika pomiędzy skrajnymi punktami "miesza" ustawienia siłowe i pozycyjne. Stopień obrotu pokrętła bardziej w jedną lub drugą stronę będzie zwiększał lub zmniejszał czułość układu na zmiany w obciążeniu.
- Pozycja Pływająca (Float Position):
W tym trybie narzędzie może swobodnie kopiować teren, co jest nieocenione przy pracy z maszynami takimi jak kosiarki czy brony talerzowe, które wymagają elastycznego dopasowania do nierówności podłoża. W niektórych ciągnikach, które oprócz regulacji pozycyjnej mają regulację pływającą (np. T-25, DT-75), należy wybrać pływającą, zwłaszcza przy narzędziach kopiujących z kółkiem. Łącznik górny ustawia się nisko przy ciągniku i wysoko przy pługu, co powoduje przenoszenie części ciężaru pługa na ciągnik i ogranicza ryzyko urwania lemiesza na kamieniu.
Należy również wspomnieć, że regulacja ciśnieniowa (zwana dociążaniem lub błędnie siłową) nie nadaje się do regulacji głębokości orki, a znacznie lepszy rezultat dociążenia można osiągnąć, ustawiając odpowiednio stromo łącznik górny. Niektóre ciągniki mogą być wyposażone w radar pomiaru prędkości, co dodaje możliwość regulacji ograniczenia poślizgu.
Praktyczne Korzyści z Systemu EHR
- Niezrównana Precyzja: Operator może ustawić parametry pracy z dokładnością do ułamka centymetra, co gwarantuje powtarzalność każdego przejazdu i optymalne wykorzystanie narzędzi.
- Automatyzacja Pracy: System samodzielnie utrzymuje zadaną głębokość orki czy siłę uciągu, odciążając operatora od ciągłej kontroli podnośnika. Zwiększa to komfort i redukuje zmęczenie, co jest kluczowe podczas długich dni roboczych.
- Sterowanie z Zewnątrz Ciągnika: Przyciski umieszczone na tylnych błotnikach pozwalają na podnoszenie i opuszczanie ramion podnośnika bez wchodzenia do kabiny, co jest nieocenione podczas samodzielnego podczepiania i odczepiania maszyn, oszczędzając czas, wysiłek i zwiększając bezpieczeństwo.
- Ochrona Sprzętu: System aktywnie tłumi drgania ciężkich maszyn zawieszonych na TUZ podczas jazdy, zwłaszcza na nierównościach. Działa to jak amortyzator, chroniąc układ hydrauliczny, konstrukcję ciągnika oraz same maszyny przed nadmiernymi obciążeniami i uszkodzeniami.
Modernizacja Starszych Ciągników i Potencjalne Problemy
Dla właścicieli starszych ciągników, takich jak popularne Ursusy czy Zetory, dostępne są zestawy modernizacyjne ("retrofit"), które pozwalają doposażyć maszyny w system elektronicznego sterowania podnośnikiem, oferując funkcjonalność zbliżoną do fabrycznych systemów EHR. Firmy oferują rozwiązania, takie jak ESP czy HPS Plus. Jednak samodzielny montaż i kalibracja takiego systemu bez odpowiedniej wiedzy technicznej i doświadczenia jest stanowczo odradzany, aby zapewnić nie tylko precyzję działania, ale przede wszystkim bezpieczeństwo operatora i maszyny.
Najczęstsze Problemy i Awaryjność EHR
Mimo zaawansowanej technologii, system EHR, jak każde urządzenie, może ulec awarii. Najczęstsze przyczyny to uszkodzenia czujników (zarówno czujnika położenia, jak i czujników siły), które mogą ulec zużyciu mechanicznemu, uszkodzeniu elektrycznemu lub zabrudzeniu, zakłócając przesyłanie prawidłowych danych do sterownika. Często spotykane są również problemy z przewodami i złączami, narażonymi na wibracje i zmienne warunki środowiskowe. W większości nowoczesnych ciągników diagnostyka awarii EHR wymaga podłączenia do komputera diagnostycznego, który odczyta kody błędów.
Kluczowym aspektem jest również prawidłowa kalibracja systemu EHR. Po każdej wymianie komponentów, takiej jak czujniki czy sterownik, a nawet po niektórych naprawach mechanicznych podnośnika, konieczne jest przeprowadzenie kalibracji. Jest to proces, który "uczy" system jego zakresów pracy i punktów odniesienia, zapewniając jego poprawne i precyzyjne działanie. Zaniedbanie kalibracji może prowadzić do nieprawidłowych reakcji podnośnika i obniżenia efektywności pracy.
Przykład Problemów z Układem Hydraulicznym w Ursusie 1224
Pewne problemy z podnośnikiem mogą wynikać z samej konstrukcji układu hydraulicznego, co widać na przykładzie ciągnika Ursus 1224, gdzie operator doświadczył problemów z podnoszeniem i opuszczaniem agregatu siewnego. Mimo wymiany pompy (na wzmacnianą), tłoka i cylindra oraz regeneracji rozdzielacza, problem (podnoszenie tylko na pełnym gazie, opadanie po zmniejszeniu gazu, niemożność podniesienia/opuszczenia) nadal występował. Taki przypadek wskazuje na złożoność układów hydraulicznych i potrzebę dokładnej diagnostyki. Problemy te mogą również obejmować niewłaściwe działanie dźwigni regulacji siłowej i pozycyjnej, gdzie dźwignia odskakuje na regulację pozycyjną podczas podnoszenia, a pompa wyje przy maksymalnym podniesieniu w trybie siłowym, co świadczy o nieprawidłowościach w pracy układu lub jego regulacji. Operator musiał zdejmować układ, aby sprawdzić, gdzie jest luz na elemencie podnośnika, gdyż podnoszenie do maksimum powodowało wycie pompy i dalsze pompowanie oleju, czego unikał, używając regulacji pozycyjnej, na której pompa nie wyła.
tags: #sterowanie #pozycyjno #silowe #ciagnik